机器人技术在制造供应链中扮演什么角色?
效率的故事不仅仅是“机器人更快”。这就是当您从单个任务扩展到协调系统时收益的累积方式。

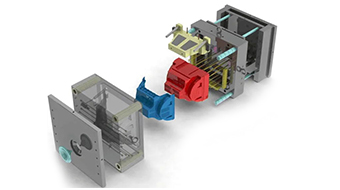
机器人技术已经从孤立站上的“点固定”转变为整个供应链的结缔组织。实际上,这意味着机器人正在从焊接或拾取不断进步。它们与设计同步,协调物料流,并以更少的停止和启动移交给仓储和履行。这种转变是由成熟的离线编程、虚拟调试和虚拟孪生让团队可以在生产线上线之前很久就对工作进行建模和优化。产品喜欢DELMIA Robotics 软件,集成CATIA和SOLIDWORKS公司并以 2,000+ 机器人模型库为后盾,正是为制造业中的机器人技术和供应链场景中的机器人技术而构建的这种端到端连续性。
目前在整个供应链中的使用
在车间,“经典”用途仍然是基础:装配线作(点、弧和表面工艺)、物料搬运、包装和码垛。过去几年的不同之处在于这些细胞现在如何与更广泛的流动联系起来。对焊接或涂装路径进行编程的同一环境还可以在仿真期间自动定位机器人、验证循环时间并计算能耗,从而加快工作单元的启动速度并运行得更精简。同时,物流不再是一个独立的领域:码垛、自动仓库和 AMR 作为模型中的一等公民与生产并列,允许以相同的保真度规划配套、生产线进料和仓库移动。
效率提升会随着您的扩展而增加
效率的故事不仅仅是“机器人更快”。这就是从单个任务扩展到协调系统时收益积累的方式:
单站:用编程路径替换重复或高精度任务。您在本地减少微停机和报废,然后开始离线编程,因此改进不会占用生产线时间。
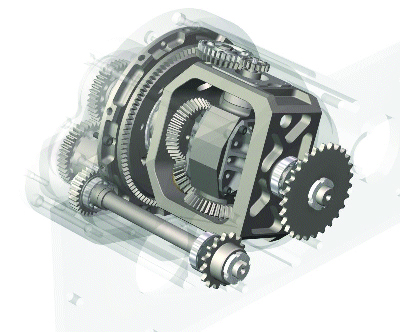
多机器人单元:通过防撞和循环时间优化协调机器人和工具。在虚拟孪生中标准化程序、重用模板和验证,以便更改可预测地交付。
集成生产线/工厂:将机器人与输送机、传感器和控制器连接起来;模拟 I/O 和高级逻辑;并通过开放式连接器(例如 FMU/RRS-2/VRC)连接到 PLC。在此阶段,由于调试转移到模型中,团队通常会看到调试时间减少 ~75%,并且客户报告说,当 OLP 成为默认设置时,编程速度提高了 80%。
改变的不仅仅是速度;这是作节奏。随着设计的发展,程序更新通过相同的数据模型从 CAD 流向机床,从而保持从工程到执行的连续性。
对劳动和安全的影响
将机器人视为安全工具和技能自动扶梯,使员工受益。人机协作可以预先建模,包括人体工程学和受保护区域,因此危险和高应变任务转移到自动化,而人们则转向编程、监督、质量和维护。模拟人类行为和机器人协作的能力,再加上虚拟调试,让操作员可以在逼真的数字环境中进行培训,从而降低坡道风险并提高现场的第一天安全性。
与人工智能、物联网和数字孪生集成
机器人是“手”,但当你将这些手连接到“眼睛和大脑”时,就会发生重大变化。在实践中:
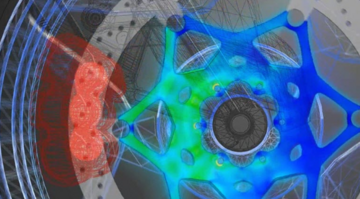
人工智能在循环中:自动无碰撞路径生成,甚至点云中的机器人识别,可加速复杂环境中的编程和转换。
物联网 + PLC/MES 连接:基于标准的链路(例如 OPC UA/DA)和控制器协同仿真将逻辑验证移动到上游,因此第一次物理运行的行为与第十次运行类似。
数字孪生作为规划基础:凭借设计到执行的连续性(CATIA/SOLIDWORKS → DELMIA Robotics),产品调整或新变体会自动更新工艺计划和机器人轨迹,从而在不延长停机时间的情况下保持节拍和质量。
制造供应链的最终结果
其结果是供应链可以快速重新计划并执行新计划,而无需暂停生产线。好处是显而易见的。实施综合机器人解决方案的现代制造公司报告称,运营成本降低了 30%,订单准确性提高了 25%。事实证明,这些收益对于管理复杂的全球供应网络的企业特别有价值,因为精度和速度决定了市场的成功。
未来趋势
三个信号很突出。首先,协作机器人 (cobots) 正在扩大多品种、小批量生产线的自动化范围,而这些生产线通常是最难证明传统笼子合理性的地方。其次,自主移动机器人 (AMR) 正在标准化内部物流,缩小生产率和材料可用性之间的差距。第三,机器人即服务 (RaaS) 和云交付正在降低中小型企业的门槛,使 OLP 和虚拟调试无需繁重的基础设施即可访问。在这一切的基础上,预计离线编程和控制器精确仿真将成为生产的默认途径,多品牌原生代码生成和开放式 PLC 连接将成为必备条件,而不是可有可无。独立研究已经认识到这一方向,DELMIA Robotics 凭借其对工作流程范围的仿真重点和与 PLC 无关的生态系统,在工业制造离线编程方面排名 #1。
结论
机器人技术是数据驱动型供应链的执行层,将设计、生产和物流链接到一个模型中,以便工厂可以从点修复转向持续优化的端到端运营。如果您的路线图制造业中的机器人技术供应链中的机器人技术从虚拟孪生开始,到同步机器人和搬运工上的本机代码结束,您正在为供应链现在的工作方式进行构建。