软件定义未来的汽车
未来的汽车与汽车过去所代表的意义几乎没有关系。我们面对的不是交通工具,而是一台无缝嵌入我们数字生活的滚动计算机,它不再是驱动而是驱动我们。这种范式转变需要一种同样新的方法来开发、设计、生产和运营下一代汽车。

“汽车”——自动驾驶,这个词是在 1860 年左右创造的,用于将新兴的蒸汽和机动车辆与马车区分开来。然而,汽车从来没有真正地自行驾驶过——驾驶员必须转向、设置速度、挂上正确的档位、发出信号并执行许多“次要活动”。几年来,越来越多的次要任务已经实现自动化 - 自动变速箱、雨量和光线传感器使车轮上的生活更轻松、更舒适。
车道偏离警告和制动辅助系统等安全功能主动干预驾驶员最重要的任务 - 转向和速度控制 - 更进一步。下一步是自动驾驶,消除主动驾驶员,使他们只是其中一名乘客。使用摄像头、雷达和其他系统,汽车可以识别周围环境,并在 AI 的帮助下决定它应该如何对其他道路使用者和环境做出反应。
这份清单遵循一个明显的趋势:虽然早期的“助手”影响了个别汽车元件,如挡风玻璃雨刷器或车灯,但现在安全功能影响了多个系统——包括转向、加速和制动——自动驾驶最终将控制所有车辆功能。集成超越了车辆本身。乘员和车辆不断连接到无处不在的数据网络,从而实现他们与周围环境之间的数据交换。您可以在视频中看到这一点:
在这里,从某种意义上说,汽车只是共享用餐体验的一个元素,就像两位主角在开车去餐厅时在车辆显示屏上选择的葡萄酒和配菜一样。
日益增长的自动化和集成必须反映在开发和设计工具中。每一次变化都可能影响车辆的其他功能,需要仔细审查。各部分之间的无数依赖关系不能再手动管理——系统工程,一个系统的系统,就是解决方案。
系统工程的第一步是定义和测试函数及其交互。这种依赖关系网络跨越了从设计和生产到使用阶段的整个产品生命周期。它确保组件和更改可以在任何阶段根据原始需求进行验证。
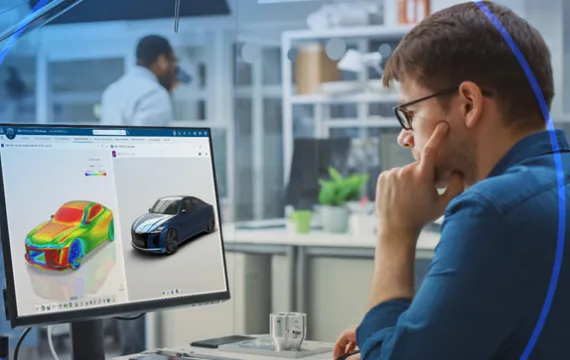
这几乎会自动创建车辆的虚拟孪生,当然也包括软件。软件支持和控制车辆中越来越多的功能,为整个系统带来越来越多的智能——最重要的是弥补驾驶员的缺席,驾驶员负责其他事情,例如会议或选择合适的葡萄酒。

软件定义汽车提供了随时集成新功能的可能性 - 客户将要求这一点。今天买车意味着购买几乎不可改变的产品,您将不得不在未来几年内忍受其缺点。这是过去的概念。软件中的错误可以快速修复,并通过无线更新分发到所有汽车。
类似地,可以推出新的或改进的功能。如果研究发现了一种新的防抱死制动策略,(几乎)不需要真正的原型;相反,该功能在虚拟孪生上进行测试,在软件中实施,并在尽可能短的时间内在现场传输到客户车辆。通过这种方式,所有所有者都可以从创新和错误修复中受益。